Si uno repasa las películas en que los robots eran protagonistas durante las décadas del ochenta o noventa pensaría que ya estaríamos acompañados de robots androides, pero la realidad suele seguir caminos distintos a las predicciones y la ficción, aunque a veces se inspira en ella. En el caso de la robótica es curioso que los robots más agiles y hábiles que se están produciendo en los últimos años sean más parecidos a los perros que a nosotros.
Esto se debe en parte a que la libertad de movimiento y capacidad de equilibrio de un robot cuadrúpedo es bastante más fácil de lograr que la de un androide bípedo como nosotros. Lo curioso de estos robots es que para demostrar sus capacidades muchas veces tienen que realizar actividades en las que los humanos son los protagonistas y mejores jugadores. Es algo similar a lo que ocurre con las pruebas que tienen que superar los programas de inteligencia artificial como Alpha Zero, que logró superar el desempeño de los mejores jugadores humanos de ajedrez y otros juegos de mesa.
Esto se hace porque una de las mejores maneras de probar el nivel de destrezas de estos programas y robots es que se enfrenten a una situación de la vida real, muchas veces en el contexto de un juego específico, para ver a qué nivel están en comparación a sus pares humanos y frente a los distintos programas y robots. Es en esta línea que el fútbol se ha vuelto un campo de prueba para los robots y recientemente uno de estos ejemplares demostró un gran desempeño en un puesto específico del juego, el de arquero.
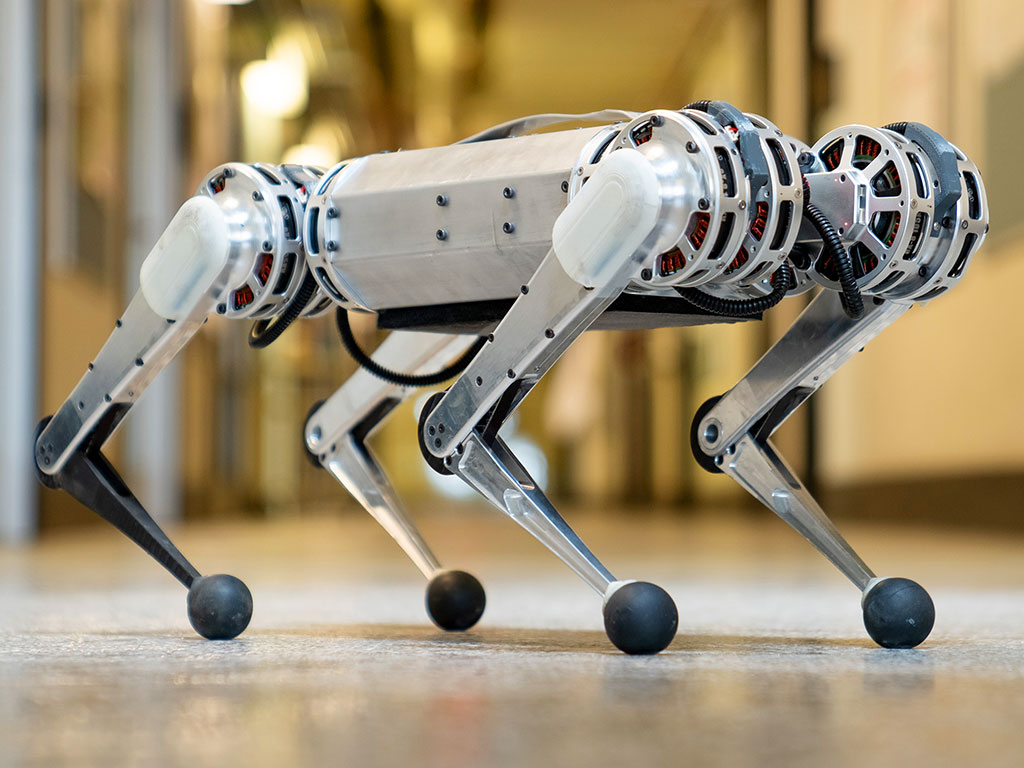
Para contrastar el desempeño hay que mencionar que los mejores porteros de fútbol profesional de la Premiere League inglesa son capaces de parar casi el 80% de los tiros a puerta. Un porcentaje bastante decente. Pero no es tan bueno como el 87,5% de los disparos que puede bloquear un robot cuadrúpedo de 9 kilos: En su diminuta portería, y frente a niños diminutos que realizan disparos diminutos, Mini Cheetah resulta ser un excelente portero.
El artículo en que se exponen las pruebas a las que se enfrentó Mini Cheetah se titula “Creating a Dynamic Quadrupedal Robotic Goalkeeper with Reinforcement Learning”, sus autores son Xiaoyu Huang, Zhongyu Li, Yanzhen Xiang, Yiming Ni, Yufeng Chi, Yunhao Li, Lizhi Yang, Xue Bin Peng y Koushil Sreenath del Laboratorio de Robótica Híbrida de la Universidad de California, Berkeley, y está disponible en arXiv.
¿Qué sentido tiene esto? Primero que todo es simplemente genial que un robot pueda hacer esto. Además, se trata de un problema difícil, porque implica una locomoción muy dinámica con manipulación de objetos, en concreto, la manipulación de un balón que se mueve rápidamente en cualquier dirección, excepto en la de la portería. Enseñar al robot a mover su cuerpo de forma dinámica y, al mismo tiempo, asegurarse de que sus pies (o su cara) acaben donde tienen que estar a tiempo para bloquear el balón es básicamente dos problemas combinados en uno. El truco consiste en combinar el controlador de locomoción adecuado con un planificador de la trayectoria del efector final que pueda encontrar la mejor manera de situar a Mini Cheetah frente al balón para la parada, todo ello en menos de un segundo que tarda el balón en llegar a la portería.
El enfoque para resolver esto fue entrenar a Mini Cheetah en un conjunto de habilidades útiles para la portería: esquivar para interceptar cerca del robot y cerca del suelo, bucear para alcanzar las esquinas inferiores de la portería y saltar para cubrir la parte superior de la portería y las esquinas superiores. La idea (¿o la esperanza?) es que todas estas habilidades sean recuperables y que el robot acabe aterrizando con seguridad sobre sus pies después. Pero, al igual que ocurre con los porteros humanos, esa es una preocupación secundaria tras la realización de una parada con éxito.
Se programa manualmente un movimiento de referencia para cada habilidad, y luego se entrena el sistema en una simulación antes de transferirlo directamente al robot. La interceptación del balón implica que el sistema elija qué habilidad hará que una pieza del robot se cruce con la trayectoria del balón de la forma más estable y eficiente desde el punto de vista energético.
La portería que defiende Mini Cheetah tiene 1,5 metros de ancho y 0,9 de alto, y el balón (tamaño 3) se lanza desde unos 4 metros de distancia. El balón se rastrea externamente. El rendimiento del robot aquí es bastante impresionante para un robot tan pequeño, pero debemos mantenerlo en su contexto:
Demostramos que nuestro sistema puede utilizarse para transferir directamente las maniobras dinámicas y las habilidades de portero aprendidas en la simulación a un robot cuadrúpedo real, con una tasa de éxito del 87,5 [por ciento] en la interceptación de disparos aleatorios en el mundo real. Observamos que los porteros de fútbol humanos tienen una media del 69 [por ciento] de paradas. Aunque se trata de jugadores profesionales que disparan a porterías de tamaño reglamentario, esperamos que este artículo nos acerque un poco más a la posibilidad de que los jugadores de fútbol robóticos compitan con los humanos en un futuro próximo.
Si se piensa en ello, el deporte del fútbol es básicamente un montón de habilidades discretas que pueden encadenarse en torno a la trayectoria de un balón en apoyo de una meta de alto nivel. Y los investigadores dicen que "el marco propuesto puede extenderse a otros escenarios, como el pateo de un balón de fútbol con múltiples habilidades". Este grupo ya ha realizado algunos trabajos iniciales sobre el tiro, y será divertido ver lo que se les ocurre a continuación.